Dynamic simulation
The building block of the dynamic simulation are referred to as subprocesses
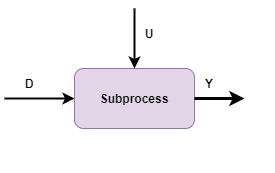
where subsystem has has
- a scalar output
Y - a scalar disturbance input
D(not directly manipulated) - a scalar or vector of manipulated variables
U.
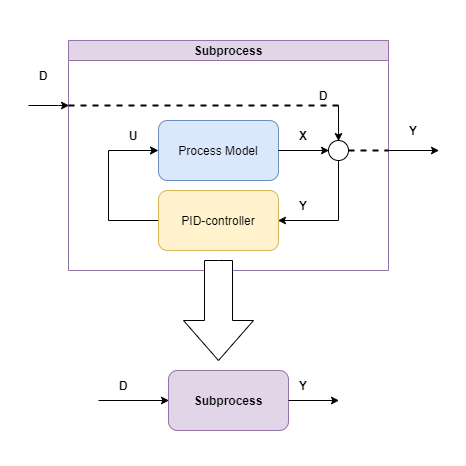
A standard PID-control loop can be implemented as a subsystem:
or it can simply be a single-input or multiple input to single output process model without feedback:
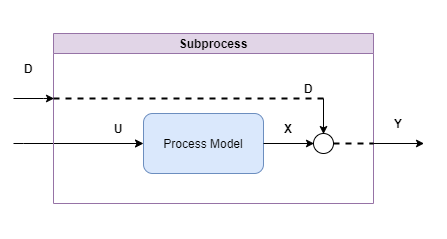 .
.
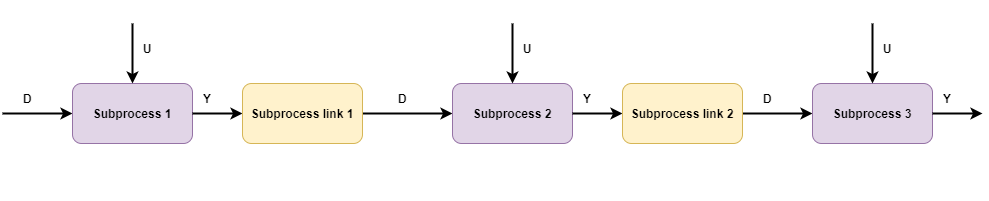
The aim of the dynamic simulation is to support dynamic simulation of entire process sections. A process is in general any set of subprocesses
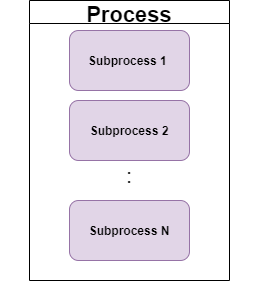
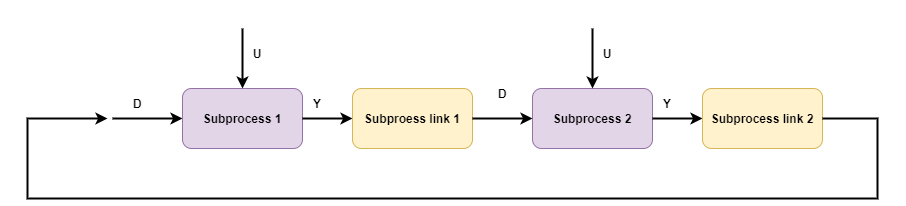
The point of co-simulating set of subprocesses is that they may be connected for instance
- subprocesses connected in series
- subprocesses that are connected in process-feedback loops
subprocesses that are controlled by PID-controllers, and
combinations of the above